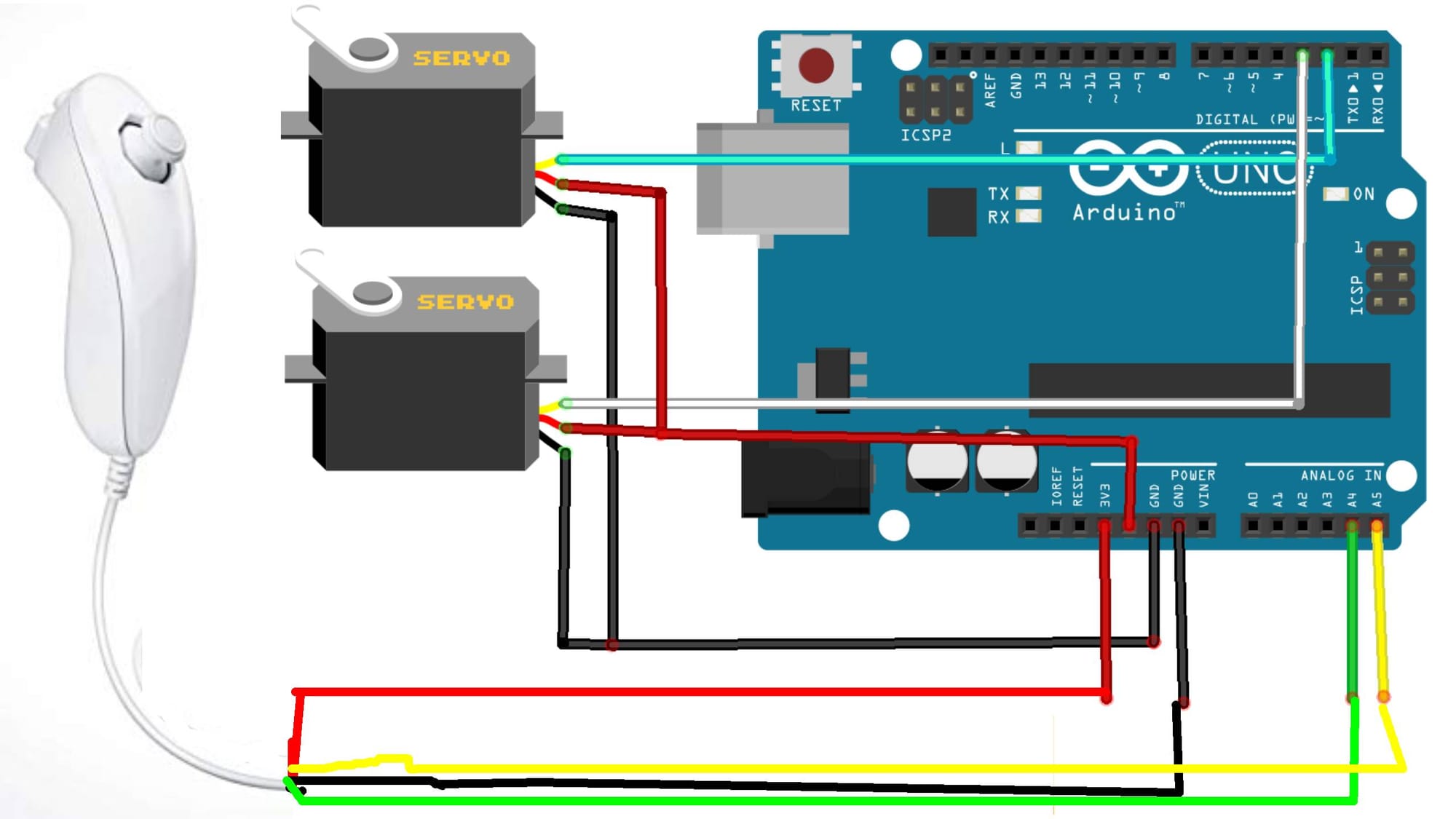
controllo servo motori con nunchuk nintendo
#include <Wire.h>
#include <Servo.h>
#include <wiinunchuck.h>
Servo panServo;
Servo tiltServo;
int pinPan = 10; // Links-Rechts
int pinTilt = 11; // Oben-Unten
float panPos = 90.0; // Aktuelle Position
float tiltPos = 90.0; // Aktuelle Position
int dxPan = 0; // Positionsänderung des Joysticks X
int dyTilt = 0; // Positionsänderung des Joysticks Y
float slowDown = 0.05; // Faktor zur Steuerung der Geschwindigkeit
void setup(){
Serial.begin(57600);
nunchuk_init();
delay(100);
nunchuk_calibrate_joy();
delay(100);
nunchuk_get_data();
delay(100);
panServo.attach(pinPan);
tiltServo.attach(pinTilt);
delay(10);
panServo.write(panPos);
tiltServo.write(tiltPos);
panPos = 90.0;
tiltPos = 115.0;
}
void loop(){
nunchuk_get_data(); // Daten vom Nunchuk empfangen
delay(10);
// Wenn C-Taste gedrückt, dann Position resetten
if (nunchuk_cbutton() == 1) {
dxPan = 0;
dyTilt = 0;
panPos = 90;
tiltPos = 115;
panServo.write(panPos);
tiltServo.write(tiltPos);
}
// Wenn Z-Taste gedrückt dann Joystick auslesen
if (nunchuk_zbutton() == 1) {
// Wert an der X-Achse vom Nunchuk ist 0-255, ergibt
// ein dxPan und dyTilt von -127 bis +128
dxPan = -(128 - nunchuk_cjoy_x());
dyTilt = (128 - nunchuk_cjoy_y());
// Joystick-Bewegung rund um die Mitte ignorieren
if (abs(dxPan) > 20) {
// Wenn Joystick-Auschlag größer als 20, dann neue Position berechnen
// Positionsänderung pro Durchlauf mit slowDown skalieren, sonst zu stark
panPos = panPos + (float)dxPan*slowDown;
}
// Gleicher Ablauf wie dxPan
if (abs(dyTilt) > 20) {
tiltPos = tiltPos + (float)dyTilt*slowDown;
}
// Positionswerte für die Servos auf 0-180 begrenzen
panPos = min(panPos, 180);
panPos = max(panPos, 0);
tiltPos = min(tiltPos, 180);
tiltPos = max(tiltPos, 0);
}
// Ausgabe am seriellen Monitor, Achtung 57600 Baud!
Serial.print("dX: ");
Serial.print(dxPan);
Serial.print(" dY: ");
Serial.print(dyTilt);
Serial.print(" X: ");
Serial.print(panPos);
Serial.print(" Y: ");
Serial.println(tiltPos);
// Neue Positionen an die Servos schreiben
panServo.write((int)panPos);
tiltServo.write((int)tiltPos);
delay(10);
}